
Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase

1
Department of Engineering Sciences, University of Agder (UiA), Jon Lilletuns vei 9, 4879 Grimstad, Norway
2
Department of Robotics, Ritsumeikan University, Kyoto 525-8577, Japan
*
Author to whom correspondence should be addressed.
Appl. Sci. 2023, 13(3), 1800; https://doi.org/10.3390/app13031800
Submission received: 9 December 2022
/
Revised: 18 January 2023
/
Accepted: 25 January 2023
/
Published: 30 January 2023
(This article belongs to the Special Issue Advances in Intelligent Robotics in the Era 4.0)
Abstract
:Every year, especially in urban areas, the population density rises quickly. The effects of catastrophes (i.e., war, earthquake, fire, tsunami) on people are therefore significant and grave. Assisting the impacted people will soon involve human-robot Search and Rescue (SAR) operations. Therefore, it is crucial to connect contemporary technology (i.e., robots and cognitive approaches) to SAR to save human lives. However, these operations also call for careful consideration of several factors, including safety, severity, and resources. Hence, ethical issues with technologies in SAR must be taken into consideration at the development stage. In this study, the most relevant ethical and design issues that arise when using robotic and cognitive technology in SAR are discussed with a focus on the response phase. Among the vast variety of SAR robots that are available nowadays, snake robots have shown huge potential; as they could be fitted with sensors and used for transporting tools to hazardous or confined areas that other robots and humans are unable to access. With this perspective, particular emphasis has been put on snake robotics in this study by considering ethical and design issues. This endeavour will contribute to providing a broader knowledge of ethical and technological factors that must be taken into account throughout the design and development of snake robots.
1. Introduction
The devastation brought on by disasters, both natural and human-made is enormous, and it necessitates a great deal of effort to ameliorate the situation [1]. In general, people in crises receive assistance from Search and Rescue (SAR) operations carried out with human interventions (assistance). The United Nations Office for the Coordination of Humanitarian Affairs (UN OCHA) [2] has categorised different SAR situations based on the operational terrain (i.e., structural collapse, confined space, fire and water, etc.), and these scenarios can occur in combinations. These situations are difficult and dangerous even for well-trained human operators. In light of this, scientists are eager to use technology to minimise any hazards to both potential victims and human rescuers.
Recently, promising robot designs (e.g., Unmanned Aerial Vehicles (UAVs) [3], Unmanned Ground vehicles (UGVs) [4], snake robots [5]) and concepts (e.g., robot teams or swarms [6], sensor networks [7]), and methods of evaluation in benchmarks for rescue robotics [8], are underway to implement the futuristic robot and cognitive technologies for SAR missions [9]. A few such examples were seen at the Fukushima nuclear disaster [10] in 2011 and the Mexico Earthquake disaster [5] in 2017.
Further, around the world, various organisations such as ‘The International Search and Rescue Advisory Group (INSARAG)’, ‘Urban Search and Rescue (USAR)’, And ‘Center for Robot-Assisted Search and Rescue (CRASR)’, helping SAR operations with the use of robots and tools technologies, some of the projects related to SAR are ‘ICARUS’ (Integrated Climate forcing and Air pollution Reduction in Urban Systems), ‘ViewFinder’, ‘NIFTI’, ‘AIRBEAM’, ‘WALK-MAN’, ‘TRADR’, ‘SHERPA’, and ‘INACHUS’ etc. [11].
The robots used in Fukushima and Mexico have limited capabilities to access the specific terrain and assess the situation. These robots cannot perform a full range of operations as human rescuers do, this is due to their limited performance capabilities. On the other hand, decision-making in complex SAR situations is challenging due to its limited time and emotional angle. However, a well-trained rescuer considers different aspects (i.e., safety, severity, sentiments) and operates with great skill to save lives. But human interventions are sometimes ineffective due to human’s limited perception capabilities and associated risks. Hence, the use of advanced technologies (i.e., robotics, sensor, cognitive approaches) could provide better intervention capabilities.
Carlsen et al. [12] and Harbers et al. [13] envisaged that the future SAR jobs will be taken over by robotic rescue teams, and will play a prominent role. The inclusion of new technologies into the SAR missions seems promising but the following critical points need to be considered to using service robots for SAR:
- what are the ethical issues in using robotic and cognitive technologies for SAR?
- what ethical challenges to consider during the development process of SAR robots (i.e., snake robots)?
- what set of guidelines or framework to follow while using robots for SAR?
Technology is advancing rapidly, and robot capabilities are vastly improving in recent times. With technological advancements, it is equally important to look at ethical issues. In general, regulatory bodies start thinking about issues after the technology is deployed, and due to this, there might be unintended causalities. Hence, ethical and regulatory frameworks must be in place for futuristic technologies to evaluate and guide advancements, especially for robotic and cognitive technologies. Further, it is equally vital to ensure that the proposed ethical or regulatory frameworks do not restrict possible technology developments. Hence, it is needed to strike a balance between innovation and regulatory frameworks.
In this paper, a perspective framework is presented to consider ethical and design challenges in robotic SAR operations. By considering the four phases of emergency management (Mitigation, Preparedness, Response, and Recovery) [14], this study focuses on the response phase. From this perspective, the study placed particular emphasis on snake robots by taking ethical and design considerations into account. Our intent is to include the most likely and evident issues, as it is difficult to take into account all the circumstances of the SAR response phase and provide a thorough examination of ethical and design issues. The proposed design and ethical framework are aimed at helping researchers, policymakers, and designers in understanding potential challenges and directing them toward creating cutting-edge robotic and cognitive SAR technologies.
The structure of this article is as follows. The background of SAR and robotic operation ethical issues are provided in Section 2; an overview of snake robotics in SAR applications is provided in Section 3. Snake robot ethical issues in the SAR response phase are highlighted in Section 4. Based on these challenges, in Section 5, design guidelines for creating snake robots are presented. Finally, concluding remarks, guidelines and future outlook are presented in Section 6.
2. Background
2.1. Search and Rescue (SAR)
About 432 disasters were reported in the past year (2021), affecting a hundred million people, resulting in 10,492 fatalities, and causing 252.1 billion USD in economic losses globally. This overall impact and death rate is consistent for the last 20 years [15]. As a result, it is critical to implement cutting-edge (robotic and cognitive) technologies to handle the problems associated with disasters. According to a survey by Mordor Intelligence, the SAR robotics sector is growing at a 20% Compound Annual Growth Rate (CAGR) [16]. Moreover, as the cost of robots has decreased over the past ten years, it has been noted that robots are now 80% less expensive than they were in 1990 [17]. With the use of low-cost and better technology, the first responders and rescue teams can access more comprehensive information to find and rescue people. On the other hand, using technology without the right rules and guidelines throughout development and implementation can lead to issues and even pose a significant threat.
The World Health Organisation (WHO), the Council of Europe, and other organisations have provided certain ethical guidelines to the rescue teams, however, the majority of these recommendations are constrained and human-centric [13,18,19]. In addition, there are a few fundamental rules for robotics that deal with ethics directly. For instance, some articles and perspective studies covered ethical concerns in robotic SAR [20] and service operations (healthcare, and entertainment) [21,22]. Using robots in SAR is undoubtedly challenging when it entails manipulation and intervention because the affected people at the disaster site may be impacted by these structural changes. Furthermore, because robots lack feelings (i.e., pain, emotion, empathy, etc.) in contrast to human rescuers traditional (human-centric) ethical principles cannot always be upheld in complex decision-making scenarios.
2.2. Ethical Issues with Robotic Applications
Robot ethics is a developing multidisciplinary study that aims at comprehending the ethical implications and effects of robotic technology, particularly autonomous robots. It is generally placed at the nexus of applied ethics and robotics. Robot ethics are sometimes known as “roboethics”. Regarding robotics, in general, the Three Laws of Robotics (often shortened to The Three Laws or known as Asimov’s Laws) pioneered this field in 1942 [23]. The Three Laws, quoted from the “Handbook of Robotics, 56th Edition, 2058 A.D.”, are as follows [24]:
- First Law. A robot may not injure a human being or, through inaction, allow a human being to come to harm.
- Second Law. A robot must obey the orders given to it by human beings except where such orders would conflict with the First Law.
- Third Law. A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
Only the robots themselves were subject to these laws, which constituted a type of machine ethics. In 1985, Asimov updated the above laws by adding the Zeroth Law [25,26], which reads:
- Zeroth Law. A robot may not injure humanity, or through inaction, allow humanity to come to harm.
These set of laws are considered fictional and not taken as real legal principles [27]. However, there have been significant technological advances since these laws were published. Today, our ideas of what robots may look like and how humans interact with them have greatly changed. To mitigate the unintended consequences of robotic behaviour, some expanded or new implicit robotic laws have been proposed in [26].
In 2002, Gianmarco Veruggio coined the term “roboethics’ which establishes ethical standards for the design, production, and use of robots. It is important to bring both human (programmers, designers, or users) and robot behaviour into regulations so that it can be controlled by law and code. Leenes et al. [28], distinguished code or law into four categories mentioned below.
- Regulating robot design, production through law.
- Regulating user behaviour through the robot’s design.
- Regulating the effects of robot behaviour through law.
- Regulating robot behaviour through code.
Roboethics is distinct from “machine ethics”, which would require robots to follow ethical guidelines, and is still in the theoretical stage because autonomous robots are not yet capable of making moral judgements [27]. This is even more relevant regarding robotics in SAR operations. For instance, robots doing inexperienced first aid may cause extra problems because of their moral incapability and uncertain nature, such as harming or breaking people’s parts of body. SAR robotics is highly human-centric, the mismatch between robots and human cognitive abilities is often the limiting factor in SAR; regardless of the technical capabilities of robots in terms of locomotion, communication, and sensing [29]. In this former field, some studies discussed ethical issues.
Nagenborg et al. [22] presented legal and ethical issues such as the responsibility and autonomy of robots in the field of healthcare, armed forces and entertainment. The authors discussed some existing regulations that apply to robotic agents. However, existing robot or machine regulations are not concrete and they might be difficult to apply in complex situations. For example, according to a robot’s code of ethics, a decision taken by a robot or machine must be safe and align with the welfare of the public. If an autonomous robotic technology misbehaved or acted illegitimately then who will claim the responsibility, is it attributed to the designer, developer, manufacturer, user, or the robot itself? It is difficult to precisely attribute the responsibility, and this might lead to potential conflicts. These issues are debatable and need a lot of philosophical understanding to address them. From a philosophical viewpoint, robots cannot be held morally responsible [30] because they are created by and acted according to the designers’ and programmers’ guidelines. In contrast, recent developments in cognitive technology demonstrate that robots are capable of independent action irrespective of their creators’ control. Hence, robots might be responsible for the actions they take. Still, we cannot conclude anything until there is proper evidence. In that instance, an appropriate self-control (body) institution can pitch in and do their investigation by checking at components like the ’black box’ after the damage [22].
Nevertheless, the ability of cognitive and robotic technologies to assist or make decisions in complex situations is still far from being realised. Prospects are predicted using contemporary sensors and nanotechnology along with advanced control algorithms (such as neural networks and evolutionary computation) [31]. Because of this, designers are unable to predict every action that the robot might take in the future. In light of this, evaluating an intelligent system’s actions is difficult. For instance, if the cognitive robot is caring for or assisting humans; it is difficult to assess the possible actions that it takes. Therefore, a developer should start considering all possible future events or problems from the time of ideation. Further, problems like the long-term effects of using robots might not be in the control of developers [17]. To test and validate the technology i.e., with distinct vulnerable groups (children and aged) is difficult because it violates the United Nations (UN) code of ethics on human (child) rights. Hence, it is still arguable to use robots for certain applications.
In addition to ethical challenges, there might be also emotional problems to be considered. Lichocki et al. discussed several other issues such as robots’ social and emotional skills, human-robot relationships, and humans’ emotional attachment towards robots. The authors compared different robot ethical studies in [30]. Further, several works considered the implementation of ethics into machines by keeping Asimov’s laws of robotics as a base. Several techniques [32,33,34,35] were discussed such as logical reasoning (procedural ethics), universal moral calculus, deontic logic, and case-based reasoning (CBR) methods (i.e., ethical reasoner, machine learning and artificial neural networks (ANNs) [36,37]). These works attempted to incorporate ethics into the robots to derive the best choice in decision-making by maximising goodness.
Based on the previous literature, the process of ethical decision-making is possible with different techniques, but it might not be adequate to use service robots in SAR with full autonomy. For instance, rigid robotic actions or irresponsible decisions might hurt or kill the person during the SAR interactions. Hence, it is important to look at both the physical and cognitive aspects of SAR. A scoping review by Battistuzzi et al. analysed the rescue robot’s literature quantitatively and qualitatively. Based on his selection criteria only six papers are in line with the rescue robot ethics [20]. Due to limited works on robotic ethics in SAR, Harbers et al. approximated ethical studies on robotic SAR to healthcare robotics, because in both cases the robots have to interact with the people and use complex terrain to traverse. In this work, ethical issues and dilemmas such as responsibility, privacy, and human-robot contact in different tasks (i.e., monitoring, assistance, companionship, navigation, manipulation and carrying) were discussed. Further, “Value Sensitive Design” (VSD) based assessment workshops were carried out to find the values and responsibilities of different stakeholders [13]. Similar to VSD, developing the robot in accordance with user requirements is also vital. In a study, Doroftei et al. took many user requirements into account when constructing a SAR robot, including quick deployment, energy, sensing, and communication [38]. Also, the User-Centered Design (UCD) approach pays close attention to the user’s demands, requirements, and constraints at every stage of the design process. This design process is iterative and includes end-user validations at key points, as noted in [39].
Moreover, in [40], several defence and security ethical issues (i.e., health and safety, privacy and security, accountability and responsibility, equality, trust, and humanity) from robotics are considered, and a framework for evaluating the morality of swarming robotic technologies that may be used in defence is discussed. From this framework, we can ask ethical questions like is it possible to distinguish a combatant from a non-combatant by swarm robots? Can swarm robotic technology aid in lowering the risk to soldiers and civilians?
Till now, most of the ethical issues mentioned in robotic applications are technology and community level but it is also important to look at the organisational or stakeholder level. In 2015, after the massive earthquake in Nepal, humanitarian organisations used drone technology to assess and mitigate the post-disastrous situation by mapping and creating 3D models of the area. During the study, five categories of ethical considerations were analysed which involved consent, care, safety, responsibility, etc, from the community level to the stakeholder level [41]. In all the above-mentioned ethical issues, the implementation of ethical considerations from the beginning of technology development is still missing. In this perspective, a study by Van Wynsberghe et al. [42] discussed the importance of bringing an ethical consideration framework into the design from the ideation phase of robot development for healthcare. The authors applied a “Care-Centered Value Sensitive Design” (CCVSD) approach to designing a care “wee-bot” robot to serve the patients. This CCVSD-based framework considered different moral aspects (i.e., attentiveness, responsibility, competence, etc.) to guide the robot designers by solving practical mechanical questions; for example what is the significance of angle and speed of the lift in robot-patient interaction? However, the explicit integration of ethics into the design of SAR robots is not found to the best of our knowledge.
2.3. Robots in SAR
Actions taken during the emergency response phase include saving lives and preventing further damage to people. Several steps are included in response phase operations, including 1. initial search and assessment, 2. targeted search, 3. localisation and identification, and 4. assistance. According to the type of emergency, environment, and available resources these stages might overlap and vary, as noted in the National SAR Manual [43]. The levels of automation for the robotic technology utilised in the response process can be categorised into Level 1: Teleoperation, Level 2: Semi-Autonomous, and Level 3: Fully-Autonomous.
Different kinds of unmanned systems (heterogeneous) are utilised in SAR, giving it an edge by combining the best aspects of each type to provide compound capabilities. For instance, small UGVs might be deployed in a given area using UAVs to explore the environment. This approach is more flexible and effective in new situations. Interoperability makes it possible for heterogeneous teams to collaborate and share information and resources. Also, interoperability assigns specific responsibilities to specific robots at different operational levels. For example, scout robots (UAVs) are used to quickly assess unknown territory, and searcher & rescuer robots (UAVs and UGVs) are used to conduct victim searches and offer support for victims [11]. ICARUS developed a technology deployment framework in [38] which is used for mission planning and coordination between the systems during the operation.
In general, robots are grouped according to their nature, autonomy, task, operational environment, and interaction [44]. The robots used for SAR can be categorised into UAVs, USV/AUV/ROV (unmanned surface vehicle/autonomous underwater vehicle/remotely operated vehicle), UGVs, UHV/UApV (unmanned hybrid vehicle/unmanned amphibious vehicle) shown in Figure 1. In SAR operations UGVs and UAVs have commonly been used systems [4,41,45,46]. Several rescue robots currently in operation, including Emily, BEAR, SaffiR, Colossus, ANYmal, Centauro, etc. [47,48,49,50,51,52]. These robots are limited to specific terrain and might have difficulties accessing constrained environments, especially during a collapsed environment. Especially in SAR, robots might encounter a variety of situations such as dirt, water, rain, confined spaces, uneven surfaces, and obstacles with unpredictable movement [53]. In these situations, a snake-like robot has the potential to be adopted due to its flexible body and multi-terrain locomotion capabilities. The benefit of utilising a snake-like robot extends beyond just entering confined spaces and field environments.
In the past, the use of robots (UGVs) in SAR situations like the World Trade Center (WTC) tragedy brought up several significant design concerns [53]. By employing UGVs, it is stated that there is a high likelihood of failures in the effectors (driving systems) and control systems—roughly 50% and 54%, respectively. This indicates that features like field repairability are key for the robots to use in SAR. Additionally, to maintain the safety of the victims who are trapped, the robot should not alter the field environment. on other hand, UGVs experience difficulty to access the environment, and require assistance during gravity, stuck, track slippage, and occluded camera.
This suggests that a snake robot would be a viable alternative to meet the many issues raised. For instance, unlike UGVs, the snake robot does not require any extra effectors (or driving systems), and the modular architecture has a benefit if the control system fails. And, the redundant design of the snake robot enables field repairability. It can grasp things with one end, lift the body, and achieve a smooth transition, even free falling may not be an issue for further locomotion. It does not require any aid (gravity, slippage) to reach the field environment. When compared to other robots, the distributed weight and usage of obstacles for locomotion in field environments gives it an advantage. Moreover, the snake-like robots can adapt to the environment of operation [54]. Due to the promising future of snake robots, researchers from Carnegie Mellon University used a snake robot for search operations in the 2017 Mexico city earthquake [5]).
On the other hand, while using robots for different social applications, it is vital to talk about how people feel about robots. This relies on various factors, including human circumstances, age, and gender. Less or no literature has been found on how people perceive robots in rescue scenarios. However, certain studies in the healthcare field revealed that older persons share the same sentiments as younger and middle-aged adults about the acceptability and usefulness of robots helping them with household and medical activities [55]. Another piece of study produced a trust scale (measurement tool) for industrial human-robot collaboration using participant feedback and suggested trust-related themes like robot performance, physical attributes, safety, etc. People’s trust is largely correlated with these trust themes [56]. Hence, based on available literature it is not feasible to tell how people perceive robots during the SAR especially snake robots but people are inclined towards robots to take help. These findings suggest that in future, robots can play an important role in rescue operations, as they can help to alleviate some of the psychological stress that victims experience.
In social robotics, inherent complexities in design are an object of ethical concern [57]. From an ethical (safety) standpoint, the robot’s ability to locate the victim quickly and offer assistance is essential. During the process, information gathering and processing will ultimately lead to the right actions to save the victim [58]. Furthermore, taking care of victims when taking action is another crucial ethical element in SAR operations. In order to account for these ethical values, it is important to consider the features and design of the robot. Therefore, in the robotic SAR, design considerations may implicitly include or exclude ethical concerns [59].
It is observed there is difficulty in reaching all field environments with other SAR robots (UGVs). Reaching, assisting, and getting information will be challenging, and this raises ethical (safety) concerns. Furthermore, because UGVs are heavy and massive sometimes, careful operation in a delicate field environment is not practicable. Hence, the aforementioned ethical issues can be resolved using a snake robot. Additionally, while interacting with the environment, the snake robot’s joint force sensors can provide information about the field environment. Last but not least, the series of elastic joints provide extra care while engaging with both the sufferer and the environment. Also, the “Center for Robot-Assisted Search and Rescue” (CRASAR) conducted an investigation and showed its desire for using highly articulated, potent, and multi-terrain robot snake [29]. Therefore, when compared to other UGVs (legged, tracked, wheeled), the snake robot seems like a decent option when taking into account its design and ethical advantages for SAR missions.
3. Snake Robot in SAR
The emergency management framework divides emergency events into four phases [60]. Figure 2 illustrates the four phases of operation: (1) Mitigation, (2) Preparedness, (3) Response, and (4) Recovery. At each stage, various parties are involved including stakeholders, civilians, first responders, and technology, and all are dependent at every phase of the operation. Authorities and stakeholders will play a crucial role in handling the situation by providing funding, regulatory frameworks, operational priorities, and permissions. First responders will use technology to save the lives of citizens in a disaster [41].
When considering the SAR scenario depicted in Figure 3, various incidents i.e., a building collapse, fire, etc., occurring as a consequence of a calamity, there are various categories of people affected by disasters, including children, physically challenged individuals, elderly, etc. In this scenario, first responders are supposed to handle the calamity by using cutting-edge robotics, and cognitive technologies to mitigate the crisis. Current teleoperated robots enable rescue teams to access harsh and inaccessible areas by manipulating and examining the collapsed buildings and provide comprehensive data by using different sensors (i.e., thermal, seismic etc.). And, with the use of haptic technology rescue interventions will get benefit with help of sense of touch and motion [61]. For applications like SAR in addition to the above-mentioned features, robots must have multiple autonomy levels, high mobility and robustness, and adaptability and environment compliance [62] like a biological snake.
Certainly, snake robots can act like multi-agent systems (i.e., task sharing, distributed computing, parallelisation and synchronisation) which is having high reachability, decomposition capability, and multiple gait patterns. Further, distributed weight provides the benefit of not adding concentrated weight to delicate objects in a destroyed or disastrous environment. Also, snake robots are capable of exploiting (utilising) the existing environment (i.e., obstacles, poles, stairs, etc.) [63,64,65,66,67] to propel forward. Unlike traditional UGVs, the snake robots’ different gait patterns enable a variety of tasks [68] and can manipulate the obstacle [69] without any additional components. Further, a modular snake robot can be deployed by different means like drones, and small UGVs; customised modules can be attached or detached from different sections of the robot to effectively perform specialised tasks. These different features give snake robots various advantages to be used in SAR. Hence, a robot inspired by biological snakes is considered a promising choice due to its robust structure and environmental compliance.
Snake robot locomotion can be achieved using multiple actuators (rigid or elastic) driving different segments of the robot’s body. The configuration of the robot can be varied to achieve different gait patterns. The power for the robot can be given from an external power cable or batteries or fuel cells. Different levels of controllers (low-level and high-level) can be used to achieve locomotion in different terrains [70]. For this traditional or machine learning control techniques [71] can be employed to move autonomously and adapt to its environment.
Snake rescue robots can be used to provide basic care and comfort by delivering food, water, and other supplies while interacting with trapped survivors. This can be achieved by combining locomotion with grasping [69]. Additionally, they can be used to communicate with survivors, enabling them to keep rescuers updated on their situation and share information about it with them.
Furthermore, snake rescue robots can be fitted with sensors and cameras that can be used to evaluate the health of survivors and give rescuers access to real-time environmental data. This can aid rescuers in identifying potential threats and preparing for them by enabling them to make well-informed decisions about how to move forward with the rescue effort.
3.1. Human Perception of Robot and Its Interaction
Understanding how victims behave and react to the robots is crucial as we use robots for rescue. Numerous studies have examined how humans view and react to robots as well as how robots should interact with people. Techniques exist to estimate people’s behaviour in specific circumstances; this behaviour helps the social robot serve people by carrying out pertinent tasks [72]. The way a robot interacts with humans must take several factors into account. Satake et al. describe how a robot might approach a person and convey its intentions through nonverbal clues [73]. During social encounters, nonverbal cues are more appropriate and less stressful [74]. Nonverbal communication can be possible with different robot gaits.
For example, humanoid robots can convey emotions through gaits, which aids in the design of human-robot interaction [75]. Similarly, snake robots could communicate with the victims through various gait patterns, and choosing the proper gait pattern can influence how the victims perceive the robot. Humans, on the other hand, may view snakes as threatening, which could cause them to feel disgusted and fearful. In [76], Radlova et al. observed that different snakes can elicit various emotions in humans and that people’s views of snakes varied according to their physical appearance. In addition, snake robots must communicate with humans in rescue scenarios, but we have not yet come across any research which relates gait patterns and human emotions. We believe that in future this will help to design the snake robot-victim interactions and people’s perceptions.
3.2. Snake Robot in Rescue Team and Its Communication
Robots are seen as part of the rescue team due to their capabilities to explore unknown and hazardous terrains and gather important data using their sensors to then send it back to the control centre to perform effective SAR. Further, these robots can be involved in different stages of operation ‘search and reconnaissance’, ‘excavation of rubble piles’, ‘capture victim bodies’, and ‘send emergency medicine’ [46]. Similarly, snake robots can be used to ‘localise and identify’, ‘locomotion and grasping’, ‘transportation’ (first aid, oxygen, water, etc.), ‘deploy or collect objects’ (radioactive materials, explosives), etc. Several works included robots in rescue organisation frameworks at several SAR operations like in the World Trade Center (WTC) disaster where robots deployed to traverse in confined space and explored the terrain [77,78,79,80].
Communication with any robot in a confined place is critical and having several issues with both wired and wireless communication. In 2003, Casper et al. studied the human-robot interaction in SAR response at WTC [77]. A task force organisation was introduced which includes robot teams and robot-assisted tasks such as “confined space search and inspection”, “monitoring”, and “victim extraction”. During the operation, several communication issues in the organisation like a skill gap between the human operators, task assignment, collaboration between the rescue roles, and communication between the robot and control centre are discussed. Most of the robotic SAR operations are performed using teleoperation [46,78,79], a general robot-operator communication framework is mentioned in [46]. From various studies, tethered communication is found to be not reliable and susceptible to tangling, and breakage. The robot can use wireless communication but there is a possibility of a loose connection with the operator as it encounters thick blocks or walls. Further, the robot and data transfer channels can be unencrypted and used by an external agency which leads to privacy issues [78,81].
3.3. Popular Snake Robots and Effectiveness Metrics
Over time, robotic snakes have been developed consistently for years. A few of these examples include the Active Cord Mechanism series (ACM III, ACM R2, ACM R3, ACM R4) robots developed by Prof. Hirose at the Tokyo Institute of Technology, the Kulko, Aiko, Anna Konda & Wheeko robots developed at NTNU’s Snake robot lab, the Unclesam robot developed at CMU, and the Mamba underwater robot developed at NTNU, etc. [82,83,84]. Some of these robots have consequently been employed in Search and Rescue efforts [5,85,86].
The major limitation of most of the available snake robots is their practical application and interaction with humans. The robots which use traditional rigid actuation design in most snake robots have the drawback of increasing the risk of harmful contact with people. Although rigid actuation systems can be powerful and precise, they also have the propensity to hurt individuals when they come into contact. Further, it lacks environmental compliance and is in rough interaction with the surroundings. This is especially troublesome when snake robots are employed for SAR missions where it interacts with the environment and people. Hence, it suggests using elastic or soft actuation methods in snake robots to prevent these risks. These systems can conform to their surroundings and provide a more gentle movement during the interactions. A few examples of such design approaches can see in [87,88,89].
In fact, it is crucial to employ a variety of criteria to determine the snake robot’s effectiveness for SAR. Depending on the particular application and its requirements, different metrics are used to assess the effectiveness of snake robots. The main metrics that can be used to compare effectiveness include the robot’s locomotion speed, manoeuvrability, controllability, robustness, sensing and perception, autonomy, energy efficiency, and human-robot interaction. The effectiveness of various gait patterns was examined by Ariizumi et al. in their study by using locomotion speed and energy efficiency [90]. Moreover, several other studies have employed forward velocity, path-following or trajectory tracking ability [91,92], and power required for snake movement to determine the systems effectiveness [93].
In addition to current advancements in snake robotics, the robot in any competing SAR scenario must deal with several ethical and design issues relating to human-robot interaction (HRI), communication, environmental circumstances, etc., which are challenging for any robot or operator to judge. Therefore, it is crucial to consider potential ethical and design considerations before developing or deploying robotic technology for SAR. In this work, a snake robot is used as a case study to better understand ethical concerns and design specifications for use in the SAR response phase.
4. Snake Robot Ethical Issues in SAR Response Phase
During the response phase, immediate actions such as deploying resources, finding and evacuating victims, and delivering vital supplies (i.e., food, medicine, oxygen, etc.) are carried out. Travelling in a confined space and navigating the barriers are crucial in this phase. A snake robot could potentially take care of all the issues listed.
It is crucial to understand the ethical issues raised by the use of robotic snakes. Even though some standard regulations and values are in place, they are not applicable in all situations that raise ethical issues. Numerous such conflicts may arise during snake robotic SAR operations. The most relevant ethical dilemmas/interests can be categorised into the following four categories: (1) Autonomy, (2) Society-robot relationship, (3) Human-robot interaction, (4) Data are shown in Table 1, which we discuss in the following sections.
4.1. Autonomy
Generally, autonomy is the capacity to select one’s own decisions and take free action as needed [31]. Numerous robots are trained to perform specified tasks repeatedly in a given context, this raises the question of whether we can still consider them autonomous. Is autonomy the ability to use intelligence to carry out predetermined decisions or the whole freedom to make decisions independently? Assuming robots have complete decision-making autonomy, various philosophical arguments can be made about whether robots’ actions are driven by the desired goal or by the best way to achieve it. If the task of saving lives in a given situation is defined as a goal of SAR robots, will the robots take the right actions to save them? And will the selected actions of the robot be according to the regulation? There is much thought involved to use autonomous robots. Hence, the question of what level of autonomy is sufficient to use for a particular operation is evident.
According to the revised autonomy and technology readiness assessment (ATRA) framework for snake robots, autonomy is divided into nine levels from remotely controlled to fully autonomous based on its guidance, navigation, and control (GNC) properties [65]. A similar framework can be extended to SAR snake robots by adding victim-robot interaction. At any autonomous level, this interaction can be divided into two basic levels: constrained and unconstrained. Constrained interactions are limited by the developer, unlike full autonomous interactions where decisions are taken by the robot independent of the user. Full autonomy implies that the robot’s decisions are independent of external systems like the operator, developer, or stakeholder. Will cognitive technology give the same capabilities of decision-making to a robot as a human rescuer by considering the victim’s feelings? There are several issues which can be brought into the robot values while developing or designing the snake robot. Hence, the following ethical considerations in autonomy are discussed below:
- Operation level:Any SAR situation will require varying technology levels of operation, from remotely controlled to fully autonomous. The application of the level of autonomy in various contexts raises philosophical issues. For instance, is remote control of robotic operations preferable to full autonomy in a precarious situation? Therefore, it is difficult for stakeholders and operators to select the appropriate level of autonomy without endangering the victims. During the ethical examination, looking into these issues is crucial.
- Equality:Robots can make their own decisions and communicate through voice and facial features thanks to advances in cognitive technology. Can people then treat robots identically to how they treat living beings? Especially during SAR, victims need someone to communicate their emotions with when they are going through various emotional breakdowns. If a robot interacts with the victim during SAR, can he/she still be able to share the same emotions with the robot? With its many gaits, the snake robot especially carries the risk of frightening the victims and alienating them from engagement. How does it alter the victim’s perspective?
- Responsibility:No matter how the robot operates, its activities are very delicate and could risk human life (i.e., remote or autonomous). In early research, there was a lot of ethical debate over who should be held responsible for robot activities. For instance, in a remote robotic operation, the stress of SAR may make it impossible for the human rescue team to provide proper instructions to the robot. If the victim experiences terrible consequences, who will be held responsible? There is still room for discussion on the viability of full autonomy and its role in robotic rescue missions.
- Rights:There are certain morally accepted limits for rescue workers to operate because it affects them mentally and physically. Fully autonomous robots might adapt and alter their behaviour based on previous experience. The advent of full autonomy might call for robot rights. So the question is, should robots have rights, and if so, what type of rights?
4.2. Society-Robot Relationship in SAR Response Phase
In the eyes of society, robots are nonliving objects that are given certain tasks to complete. In the future, service robots will be a part of society, and people may view them as companions and develop emotional ties with them. For instance, many people today can no longer survive even for small periods of time without their electronic gadgets. Moreover, some people have an emotional attachment to material possessions (such as toys). It is unclear how society will ultimately see robots in the future. Although society may be open to the idea of robots performing normal tasks, it is not apparent whether this is the case with SAR operations. Will society accept robots to perform tasks? We try to look at society-robot relationship issues by considering the following ethical aspects:
- Nostalgia and conservatism:People throughout the world hold diverse societal beliefs and ideologies towards the use of technology. In some regions, people are enthusiastic about embracing new technologies like robots. For instance, some people enjoy using services like food cooked by robots, although this may not be the case for other people. In future, robot behaviour can be regarded as a humanlike entity with increased cognitive capabilities [94]. Likewise, the possibility that a particular society also accepts SAR robots in times of disaster is debatable.
- Trust:For society to embrace technology, it must be trusted; even for the human rescue team, complex SAR missions are challenging. Therefore, will society have enough trust in robotic rescuers?
- Expectation:Considering that technology has advanced to the point where robots can be used in SAR and have gained societal acceptance, then there will be a problem with people’s expectations of the robot [94]. Robots might have a limited range of capabilities for certain rescue operations, and their decisions may sometimes conflict. It matters what level of expectation the victims can place on robots.
4.3. Human-Robot Interaction
The ability of robots to interact (both directly and indirectly) with victims during SAR is crucial. By taking the interaction feedback from the robot the rescue team can evaluate the situation and take appropriate action. In some circumstances, the robot needs to interact physically with victims to comprehend the situation and save them. When compared to human interactions, robotic interactions are less natural. Additionally, the interactions have to be according to ethical standards (both directly and indirectly). During the interaction, the robot must understand the victim’s situation and take proper decisions and avoid irresponsible movements that could hurt victims. From this perspective, the following aspects are considered:
- Accountability:The degree of robot interaction required with the victim must be evaluated; robot-victim interaction can be fully autonomous or remotely operated. For instance, during the interaction victim may get hurt because of hardware failure even after taking the right interaction decision by the operator or robot. Who is responsible for such an incident? Is it the hardware developer, the operator or the robot (for not looking at the hardware capabilities/failures, who is responsible? It is challenging to hold any participant liable in this scenario for the robot’s irresponsible actions.
- Reliability and trust:Consider a scenario in which a robot is ready to assist a victim who is physically injured. A robot tries to help the victim by holding or moving out of the situation. During this situation, will the victim have enough belief that the robot interaction will be safe and will not harm? People might not have clue about the robot’s actions and its interactions, which may or may not ease the victim. Will a robot make the right choices consistently under different circumstances and act accordingly? This raises questions on reliability and trust in robot interactions.
- Care and safety consideration:SAR operations carried out by human rescuers typically include victim care and safety. Humans are capable of comprehending both the victim’s physical and emotional experiences. Will SAR robots perform with similar care and safety, and comprehend the victim’s situation as human rescuers do?
4.4. Data
Data collection, storage, and usage are the main stages of any SAR process. The sensitive data collected throughout these missions include location and personal information. Although sometimes it is necessary to gather personal information through cameras and sensors, it might conflict with the individual’s interests. It is crucial to look at the consent of different victims. The stakeholders must keep this in mind by considering different issues like data storage and accessibility. Further, data authority and its usage must be taken into consideration [41].
- Data safety and security:The sensible data gathered from the catastrophe need to be secured in a safe location. In such a case, who will be in charge of maintaining data safety and security from unethical practices? How do officials ensure that the information obtained during SAR is stored securely and is impervious to hacking attempts from any other agencies?
- Accessibility:How to identify and whom to provide ownership of the SAR data, whether it be the robot, local government, or an organisation. Further, defining the method of using data is difficult. By addressing various ethical challenges, the government must create operational criteria for data management (how and for what purpose the data can be utilised in the future).
- Privacy:The kind of information the robot gathers is crucial. People need to be aware of the data collected and how it will be used in the future. Different data-related issues must be communicated to the designers and robot operators to protect victim privacy. Further, if data is collected; it must be appropriately organised to avoid having an impact on people.
From the above discussion, it is crucial to consider ethical issues while developing and deploying robotics for the SAR response phase. The ethical framework mentioned above can be used with snake robot technology. The following list outlines the dilemmas that will arise when using snake robots in the SAR response phase.
4.5. Ethical Dilemmas Identified in the SAR Response Phase with Snake Robots
- Should snake robots be deployed in the SAR response phase given their potential to save or endanger lives depending on the situation?
- What level of the snake’s autonomy is appropriate to use, and how does that impact SAR operations?
- Will the type and degree of human-robot interaction be important, and if yes, what kind and degree of interaction should be used in certain circumstances?
- Will an autonomous snake robot receive the same treatment as a human rescuer?
- Who will be held accountable if the snake robot behaves irresponsibly or malfunctions when interacting with the victim?
- When given rights, what kind of rights should the snake robot have?
- Will the snake robot be accepted by society for use in SAR response phase operations?
- Is it possible to put adequate trust in snake robot operations?
- Will society have higher expectations than what a snake robot is capable of?
- How to handle the victim’s sentiments and emotions as they are being managed by the snake robot?
- Will snake robot behaviour be reliable and able to gain victims’ trust?
- Will snake robots carry out various tasks safely and with care?
- Will the information gathered by the snake robot during the operation be stored securely?
- Who has access to the data and how may it be utilised later?
- Will data collection adhere to privacy laws?
Some of the ethical problems and dilemmas mentioned early may be seen as design problems that could be resolved by integrating ethical standards into the design during the innovation process [44]. Along those lines, Wynsberghe et al. and Harbers et al. [13,42] used the “Value Sensitive Design” (VSD) approach for this. VSD method incorporates the ethical values of the robot or stakeholders (humans, rescue team, authorities, etc.) into the design throughout the development process. In this article, we will use a similar approach to figure out different design issues based on the mentioned ethical challenges above.
5. Snake Robot Design Considerations for SAR Response Phase
In [13], an “robot-assisted SAR” was taken as an example to find different values (i.e., autonomy, accountability, privacy, etc.) and value tensions of robots or stakeholders. Value tensions describe conflicts between values, which are used in the design process to determine which value should be prioritised. In [42], a urine testing “wee-bot” robot is designed by using a “care-centred value sensitive design” (CCVSD) approach, which demonstrated that ethical principles could be incorporated into technical design requirements. In the CCVSD framework for care robots, certain values (e.g., attentiveness, responsibilities, and responsiveness) are chosen as per the care practice requirements, and used robot’s characteristics/components such as the context of use, care practice, actors involved, and type of robot (e.g., capabilities and appearance etc.). These considered components and values vary based on the robot’s application. Based on this, the selected values and ethical issues are converted into the design requirements.
As discussed in the previous sections, several ethical issues need to be considered to using snake robots for SAR missions. However, there are certain use scenarios of snake robots in SAR missions covered in [5,86,95,96]. In the case of an earthquake in Mexico, a 16-module U-snake teleoperated with a lengthy extension cord is used to reach places that conventional robots or sensing equipment cannot [5]. A number of drawbacks are cited from this practical implementation. Rescue workers assumed that the robot has many capabilities such as carrying food and water, and is equipped with a microphone and speaker. From a design standpoint, including these additional features to the U-snake may reduce its mobility. Moreover, issues such as tether management, deployment speed, multi-environment use, visibility (for situational awareness), human-to-robot ratio, path planning, and mid-level control are pointed out for better snake robot interventions in the SAR response phase. These mentioned design issues lead to ethical issues. For example, rescue workers’ expectations exceed the U-snake robot’s sensor capabilities (i.e., only the camera is mounted but expected microphone and speaker features). Furthermore, tether management is difficult, it might entangle and harm the victim. Hence, ethical issues can be mapped to design requirements and VSD can be used for developing snake robot technology for SAR.
Consequently, in this section, we discuss several design requirements for snake robots based on ethical issues in SAR situations. We classified design requirements into three categories: mechanical/hardware, control and software. These categories are discussed as follows.
5.1. Mechanical/Hardware Design
The physical characteristics of the robot, i.e., its length, diameter, number of modules, and weight, are crucial for SAR operations. Assume that robots must move through a limited environment and that greater length and size restrict their ability to access and move within that environment. On the contrary, small size and length prevent the inclusion of the required sensors or hardware, which may restrict the robot’s operating potential. As a result, the robot cannot always behave as per rescue personnel and victims’ expectations. Additionally, the robot may restrict data collection due to fewer sensors. However, modern integrated circuits (IC) and nanotechnologies are working to significantly reduce the size of the components, making it possible to fit more hardware into a small area.
The majority of physically realised snake robots in the literature [97,98,99,100] utilise rigid actuation, which is dangerous for interactions with humans and offers only a limited degree of environment adaptability. These design problems lead to ethical concerns with SAR robots. As a result, stiff/rigid actuation systems are not recommended. Conversely, using soft and elastic actuation during SAR may offer benefits like compliance, safety, dexterity, etc. Additionally, it makes robot interactions intrinsically safe and therefore addresses the corresponding ethical problems. Accordingly, a few soft and elastic actuated snake robots were built in [88,101,102,103] by exploiting soft robotics advantages [104]. Further, the addition of many sensors (i.e., camera, IR, Lidar, temperature, gyroscope, accelerometer, smoke, and haptic) enhances the ability to discover, locate, and evaluate the victim’s health. However, it will have value conflicts with safety and data privacy. The regulatory bodies must decide which sensors can be used in SAR and what kind of data can be accessed (Figure 4).
Additionally, a snake robot may be used as a multi-agent system by utilising its modular design. Erkmen et al. discussed the benefits of employing a multi-agent system for SAR in [62]. With this, the large or heavy snake robot may be easily transported and deployed by humans or drones to a disaster situation to start quick rescue operations. One of the critical requirements for SAR interventions is to quickly deploy the technology at the disaster site. In the case of the Mexico earthquake [5], this was not performed immediately, which put a limit on rescuers’ ability to achieve their goals. Further, modular design provides the advantage of distributed weight by using multiple components (e.g., batteries and electronics) in different sections. Also, snake robots can mount redundant microcontrollers and sensors to increase robustness as shown in Figure 4a. In case of any damage to one of the modules during the operation, we can disengage it and replace it with other modules for further operation, as an illustration, see Figure 4b.
In any disaster, communication (i.e., internet, mobile signals) networks will be destroyed, which makes rescue teams difficult to communicate and perform autonomous operations. This problem can be addressed by using temporarily restoring the communication channels using drones [105]. These approaches enable the rescue team to quickly and effectively access the disaster situation, improving their ability to intervene, they may also help society to build trust and expectations of technology.
Finally, it’s critical to take into account how victims view snake robots. Given that most people are terrified of biological snakes, will the victim’s fright be the same as biological snakes when a robot approaches to help them? How should the snake be designed so that victims feel safe when they see it? How would the gait patterns affect the victim’s condition? These kinds of different ethical concerns need philosophical discussions going forward.
5.2. Control Design
The control design requirements and ethical considerations mentioned in Section 4 for the SAR-snake robot can be discussed using the ATRA framework [65]. Figure 5 shows the Guidance, Navigation and Control (GNC) interface for the snake robot. In this section, GNC design requirements for SAR operations are explored by considering several ethical issues.
The snake robot’s operation is challenging at a low autonomy level (i.e., level 1) because it is controlled remotely via a cord connection. In general, it is not a good idea to operate the robot with a cord because it requires an additional operator to manage it [5]. Hence, adopting higher autonomy levels improves the intervention capabilities by using high-level decision-making, situational awareness through sensors, and better motion control. In [5], Whitman et al. recommended establishing mid-layer autonomy between joint-level control and guidance. However, it is still debatable to select the degree of autonomy to operate. For instance, if guidance and navigation give the robot incorrect information and it gets trapped in the terrain. This results in activities being delayed, which is unacceptable for a mission that calls for a fast response. In [106], a guidance model is developed based on the Braitenberg algorithm which guides the snake robot towards a stimulus (i.e., light, sound, chemical, etc.). Similar techniques can be employed for SAR response phase operations to locate the victims or to find the openings in collapsed buildings. With these techniques, some of the responsibility issues can be addressed by properly locating and guiding victims into a safer place.
Furthermore, complete autonomy in terms of navigation and guidance is desirable and attainable. The full autonomy of snake robots in human-robot interaction (control), however, is up for debate because cognitive technology is not yet at a point where it can comprehend the victim’s feelings and emotions. Additionally, it raises various ethical concerns during the interaction, including issues of equality, rights, trust, and accountability. An example ethical dilemma in decision-making while choosing between two distinct kinds of people is shown in Figure 6. Secondly, the robot’s gait pattern and movement play a critical role in comforting victims. Therefore, the controller must be designed carefully to maintain suitable gait patterns for each condition without scaring the victim.
Finally, rescue personnel need to be taught to comprehend the capabilities of the snake robot and various problems that can occur during SAR operations. To do this, the necessary simulation tools must be in place to train personnel and safely test the technology, helping in the adoption of reliable technologies in challenging SAR missions.
5.3. Software Design
A robust software framework must be developed to design, and deploy the snake robot’s GNC system and enhance autonomy. Modularity, maintainability, reusability, reliability, and scalability are some of the qualities that must be considered for this to ensure efficient functioning. To manage and achieve the required performance as a complex system, the software architecture may be divided into smaller, easier-to-understand units. There are two standard methods for designing software architecture (monolithic, and distributed). Monolithic design, while being the simplest and most straightforward to create, is inefficient because it only has one control/processor unit. On the other hand, the distributed architecture employs a number of control units, decomposing and modularising the complicated system. Complex systems can be handled more effectively in this fashion, as demonstrated by Ferrarini et al. in [107]. Distributed architecture is further divided into flat and hierarchical architecture subcategories. All control units in a flat architecture are connected to agent inputs directly and are on the same level. In hierarchical approaches, different levels of control units are interconnected by other units.
Understanding the software design architecture is crucial for tackling several challenges in the development of snake robots. As previously mentioned, snake robotics offers the benefit of using modularity in both hardware and software, resulting in improving the robot’s functionality and robustness in SAR applications. Additionally, the control and communication design may benefit from a modular and multi-layer software approach. With this, it is possible to implement secured protocols to protect data. Additionally, it can protect against hackers and outside unlawful organisations’ intrusions. With robust architecture, ethical issues related to data such as data safety, accessibility, and privacy can be addressed.
Furthermore, various software (middleware) applications such as the “robot operating system” (ROS) [108,109] and “open robot control software” (Orocos) [110] will be utilised to develop robotic applications [88,111]. With these middleware applications, one can implement the aforementioned software architectures to interact with real robots and simulation environments (like Gazebo, V-rep, ODE, etc.) [112,113]. Further, these software and simulation tools can be used for testing and training the robots and rescue workers.
6. Remarks and Future Work
With a focus on snake robots, this article discussed crucial ethical concerns and challenges for robotic Search and Rescue (SAR) response phase operations. The discussion focuses primarily on four ethical issues: autonomy, society-robot relationships, human-robot interaction, and data. For each issue, several ethical considerations are examined. Using this framework, some significant concerns are questioned for snake robots in the SAR response phase. In addition, various design requirements were explored to address the several identified ethical concerns. On the other hand, it needs to be noted that it is extremely unlikely to include all potential response phase conditions in this study due to its complex and different scenarios. Thus, the most evident ethical issues and design needs were considered. This study may be valuable for robotic developers or policymakers (stakeholders) when they take certain ethical concerns and design challenges into account while developing robots or making regulations.
The authors hope to take into account a number of the ethical issues raised in this paper in their subsequent work and build a snake robot in accordance with its design requirements.
Author Contributions
Conceptualization, H.C. and F.S.; formal analysis, H.C.; investigation, H.C.; resources, H.C.; writing—original draft preparation, H.C.; writing—review and editing, H.C. and F.S. and S.M.; visualization, H.C. and F.S.; supervision, F.S. and S.M.; All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Top Research Centre Mechatronics (TRCM), University of Agder (UiA), Grimstad, Norway, https://www.uia.no/en/research/priority-research-centres/top-research-centre-mechatronics-trcm (accessed on 29 January 2022) and the Center for Integrated Emergency Management (CIEM), University of Adger (UiA), Grimstad, Norway https://www.uia.no/senter-og-nettverk/ciem-senter-for-integrert-krisehaandtering (accessed on 29 January 2022).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors are grateful to Kristin Y. Pettersen (NTNU, Trondheim) for her encouragement and support during the study. The Top Research Centre Mechatronics (TRCM) and Center for Integrated Emergency Management (CIEM) at the University of Adger (UiA), which provided funding for this study, are both acknowledged by the authors.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| SAR | Search and Rescue |
| UN OCHA | United Nations Office for the coordination of Humanitarian Affairs |
| CAGR | Compound annual growth rate |
| UGV | Unmanned Ground Vehicle |
| UAV | Unmanned Aerial Vehicle |
| WHO | World Health Organisation |
| CBR | case-based reasoning |
| ANN | Artificial neural networks |
| VSD | Value sensitive design |
| ROS | Robot Operating System |
| GNC | Guidance, Navigation and Control |
| ATRA | Autonomy and technology readiness assessment |
| CCVSD | Care-Centered Value Sensitive Design |
| ODE | Open Dynamic Engine |
| INSARAG | International Search and Rescue Advisory Group |
| ICARUS | Integrated Climate forcing and Air pollution Reduction in Urban Systems |
| UCD | User-Centered Design |
| AUV | Autonomous Underwater Vehicle |
| ROV | Remotely Operated Vehicle |
| UHV | Unmanned Hybrid Vehicle |
| UApV | Unmanned amphibious Vehicle |
| CRASAR | Center for Robot-Assisted Search and Rescue |
| ACR | Active Cord Mechanism |
| HRI | Human-Robot Interaction |
References
- Zibulewsky, J. Defining disaster: The emergency department perspective. In Baylor University Medical Center; Taylor & Francis: New York, NY, USA, 2001; Volume 14, pp. 144–149. [Google Scholar]
- INSARAG Guidelines, Volume II Preparedness and Response, Manual A Capacity Building (2020). Available online: https://reliefweb.int/report/world/insarag-guidelines-volume-ii-preparedness-and-response-manual-capacity-building-2020 (accessed on 2 November 2022).
- Bravo, R.; Leiras, A. Literature review of the application of UAVs in humanitarian relief. In Proceedings of the XXXV Encontro Nacional de Engenharia de Producao, Fortaleza, CE, Brasil, 13–16 October 2015; pp. 13–16. [Google Scholar]
- De Cubber, G.; Serrano, D.; Berns, K.; Chintamani, K.; Sabino, R.; Ourevitch, S.; Doroftei, D.; Armbrust, C.; Flamma, T.; Baudoin, Y. Search and rescue robots developed by the European icarus project. In Proceedings of the 7th International Workshop on Robotics for Risky Environments, Saint-Petersburg, Russia, 1–3 October 2013. [Google Scholar]
- Whitman, J.; Zevallos, N.; Travers, M.; Choset, H. Snake robot urban search after the 2017 Mexico City earthquake. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–6. [Google Scholar]
- Couceiro, M.S. An overview of swarm robotics for Search and Rescue applications. In Artificial Intelligence: Concepts, Methodologies, Tools, and Applications; IGI Global: Pennsylvania, PA, USA, 2017. [Google Scholar]
- Ochoa, S.F.; Santos, R. Human-centric wireless sensor networks to improve information availability during urban Search and Rescue activities. Inf. Fusion 2015, 22, 71–84. [Google Scholar] [CrossRef]
- Schneider, F.E.; Wildermuth, D.; Wolf, H.L. ELROB and EURATHLON: Improving search & rescue robotics through real-world robot competitions. In Proceedings of the 2015 10th International Workshop on Robot Motion and Control (RoMoCo), Poznan, Poland, 6–8 July 2015; pp. 118–123. [Google Scholar]
- Murphy, R.R.; Tadokoro, S.; Nardi, D.; Jacoff, A.; Fiorini, P.; Choset, H.; Erkmen, A.M. Search and Rescue Robotics. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1151–1173. [Google Scholar]
- Kawatsuma, S.; Fukushima, M.; Okada, T. Emergency response by robots to Fukushima-Daiichi accident: Summary and lessons learned. Ind. Robot. 2012, 39, 428–435. [Google Scholar] [CrossRef]
- Cubber, G.D.; Doroftei, D.; Rudin, K.; Berns, K.; Serrano, D.; Sanchez, J.; Govindaraj, S.; Bedkowski, J.; Roda, R. Search and Rescue Robotics-from Theory to Practice; IntechOpen: London, UK, 2017. [Google Scholar]
- Carlsen, H.; Johansson, L.; Wikman-Svahn, P.; Dreborg, K.H. Co-evolutionary scenarios for creative prototyping of future robot systems for civil protection. Technol. Forecast. Soc. Chang. 2014, 84, 93–100. [Google Scholar] [CrossRef]
- Harbers, M.; Greeff, J.D.; Kruijff-Korbayová, I.; Neerincx, M.A.; Hindriks, K.V. Exploring the ethical landscape of robot-assisted Search and Rescue. In A World with Robots; Springer: Cham, Switzerland, 2017; pp. 93–107. [Google Scholar]
- Cova, T.J. GIS in emergency management. Geogr. Inf. Syst. 1999, 2, 845–858. [Google Scholar]
- 2021 Disasters in Numbers. Available online: https://www.cred.be/publications (accessed on 10 November 2022).
- Search and Rescue Robots Market- Growth, Trends, COVID-19 Impact, and Forecasts (2022–2027). Available online: https://www.mordorintelligence.com/industry-reports/search-and-rescue-robots-market (accessed on 10 November 2022).
- Sharkey, N. The ethical frontiers of robotics. Science 2008, 322, 1800–1801. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ethics in Epidemics, Emergencies and Disasters: Research, Surveillance and Patient Care. Available online: https://www.who.int/publications/i/item/9789241549349 (accessed on 11 November 2022).
- Civaner, M.M.; Vatansever, K.; Pala, K. Ethical problems in an era where disasters have become a part of daily life: A qualitative study of healthcare workers in Turkey. PLoS ONE 2017, 12, e0174162. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Battistuzzi, L.; Recchiuto, C.T.; Sgorbissa, A. Ethical concerns in rescue robotics: A scoping review. Ethics Inf. Technol. 2021, 23, 863–875. [Google Scholar] [CrossRef]
- Belk, R. Ethical issues in service robotics and artificial intelligence. Serv. Ind. J. 2021, 41, 860–876. [Google Scholar] [CrossRef] [Green Version]
- Nagenborg, M.; Capurro, R.; Weber, J.; Pingel, C. Ethical regulations on robotics in Europe. In Machine Ethics and Robot Ethics; Routledge: Oxfordshire, UK, 2008; pp. 473–490. [Google Scholar]
- Heaven, D. Robot laws. New Sci. 2018, 239, 38–41. [Google Scholar] [CrossRef]
- Nof, S. Handbook of Robotics, 56th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1999. [Google Scholar]
- Asimov’s Laws: Do They Work in Modern Robotics? Available online: https://kassailaw.com/ai/asimovs-laws-do-they-work-in-modern-robotics/ (accessed on 10 January 2023).
- Asimov’s Laws of Robotics: Implications for Information Technology. Available online: http://www.rogerclarke.com/SOS/Asimov.html (accessed on 10 January 2023).
- Nevejans, N. European Civil Law Rules in Robotics; European Union: Brussel, Belgium, 2016. [Google Scholar]
- Leenes, R.; Lucivero, F. Laws on robots, laws by robots, laws in robots: Regulating robot behaviour by design. Law Innov. Technol. 2014, 6, 193–220. [Google Scholar] [CrossRef]
- Making My Point for Me: Beyond Asimov. Available online: https://crasar.org/tag/ethics/ (accessed on 10 January 2023).
- Łichocki, P.; Billard, A.; Kahn, P.H. The ethical landscape of robotics. IEEE Robot. Autom. Mag. 2011, 18, 39–50. [Google Scholar] [CrossRef] [Green Version]
- Haselager, W.F. Robotics, philosophy and the problems of autonomy. Pragmat. Cogn. 2005, 13, 515–532. [Google Scholar] [CrossRef]
- Maner, W. Heuristic methods for computer ethics. Metaphilosophy 2002, 33, 339–365. [Google Scholar] [CrossRef]
- Marino, D.; Tamburrini, G. Learning robots and human responsibility. In Machine Ethics and Robot Ethics; Routledge: Oxfordshire, UK, 2020; pp. 377–382. [Google Scholar]
- Moor, J.H. The nature, importance, and difficulty of machine ethics. IEEE Intell. Syst. 2006, 21, 18–21. [Google Scholar] [CrossRef]
- Pal, S.K.; Shiu, S.C. Foundations of Soft Case-Based Reasoning; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Honarvar, A.R.; Ghasem-Aghaee, N. An artificial neural network approach for creating an ethical artificial agent. In Proceedings of the 2009 IEEE International Symposium on Computational Intelligence in Robotics and Automation-(CIRA), Daejeon, Republic of Korea, 15–18 December 2009; pp. 290–295. [Google Scholar]
- McLaren, B.M. Computational models of ethical reasoning: Challenges, initial steps, and future directions. IEEE Intell. Syst. 2006, 21, 29–37. [Google Scholar] [CrossRef] [Green Version]
- Doroftei, D.; Matos, A.; de Cubber, G. Designing Search and Rescue robots towards realistic user requirements. In Applied Mechanics And Materials; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2014; Volume 658, pp. 612–617. [Google Scholar]
- Doroftei, D.; De Cubber, G.; Wagemans, R.; Matos, A.; Silva, E.; Lobo, V.; Cardoso, G.; Chintamani, K.; Govindaraj, S.; Gancet, J.; et al. User-centered design. In Search and Rescue Robotics. From Theory to Practice; IntechOpen: London, UK, 2017; pp. 19–36. [Google Scholar]
- Wasilow, S.; Thorpe, J.B. Artificial intelligence, robotics, ethics, and the military: A Canadian perspective. AI Mag. 2019, 40, 37–48. [Google Scholar] [CrossRef]
- Wang, N. “We Live on Hope…”: Ethical Considerations of Humanitarian Use of Drones in Post-Disaster Nepal. IEEE Technol. Soc. Mag. 2020, 39, 76–85. [Google Scholar] [CrossRef]
- Van Wynsberghe, A. A method for integrating ethics into the design of robots. Ind. Robot. 2013, 40, 433–440. [Google Scholar] [CrossRef]
- National Search and Rescue Manual. Available online: https://www.amsa.gov.au/national-search-and-rescue-council/manuals-and-publications/national-search-and-rescue-manual (accessed on 10 January 2023).
- Leenes, R.; Palmerini, E.; Koops, B.J.; Bertolini, A.; Salvini, P.; Lucivero, F. Regulatory challenges of robotics: Some guidelines for addressing legal and ethical issues. Law Innov. Technol. 2017, 9, 1–44. [Google Scholar] [CrossRef] [Green Version]
- Brodeur, T.; Regis, P.; Feil-Seifer, D.; Sengupta, S. Search and Rescue operations with mesh networked robots. In Proceedings of the 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 8–10 November 2018; pp. 6–12. [Google Scholar]
- Matsuno, F.; Tadokoro, S. Rescue robots and systems in Japan. In Proceedings of the 2004 IEEE International Conference on Robotics and Biomimetics, Shenyang, China, 22–26 August 2004; pp. 12–20. [Google Scholar] [CrossRef]
- Schofield, R.T. Potential Fields Navigation of Lifeguard Assistant Robot for Mass Marine Casualty Response. Ph.D. Thesis, Texas A&M University, Austin, TX, USA, 2018. [Google Scholar]
- Chandrasekaran, B.; Conrad, J.M. Human-robot collaboration: A survey. In Proceedings of the SoutheastCon 2015, Fort Lauderdale, FL, USA, 9–12 April 2015; pp. 1–8. [Google Scholar]
- Lahr, D.F. Design and Control of a Humanoid Robot, SAFFiR. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2014. [Google Scholar]
- Bogue, R. The role of robots in firefighting. Ind. Robot Int. J. Robot. Res. Appl. 2021, 48, 174–178. [Google Scholar] [CrossRef]
- Hutter, M.; Gehring, C.; Jud, D.; Lauber, A.; Bellicoso, C.D.; Tsounis, V.; Hwangbo, J.; Bodie, K.; Fankhauser, P.; Bloesch, M.; et al. Anymal-a highly mobile and dynamic quadrupedal robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2016; pp. 38–44. [Google Scholar]
- Klamt, T.; Schwarz, M.; Lenz, C.; Baccelliere, L.; Buongiorno, D.; Cichon, T.; DiGuardo, A.; Droeschel, D.; Gabardi, M.; Kamedula, M.; et al. Remote mobile manipulation with the centauro robot: Full-body telepresence and autonomous operator assistance. J. Field Robot. 2020, 37, 889–919. [Google Scholar] [CrossRef] [Green Version]
- Carlson, J.; Murphy, R.R. How UGVs physically fail in the field. IEEE Trans. Robot. 2005, 21, 423–437. [Google Scholar] [CrossRef]
- Kakogawa, A.; Ma, S. An in-pipe inspection module with an omnidirectional bent-pipe self-adaptation mechanism using a joint torque control. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 4347–4352. [Google Scholar]
- Hall, A.K.; Backonja, U.; Painter, I.; Cakmak, M.; Sung, M.; Lau, T.; Thompson, H.J.; Demiris, G. Acceptance and perceived usefulness of robots to assist with activities of daily living and healthcare tasks. Assist. Technol. 2017, 31, 133–140. [Google Scholar] [CrossRef] [PubMed]
- Charalambous, G.; Fletcher, S.R. Trust in Industrial Human–Robot Collaboration. In The 21st Century Industrial Robot: When Tools Become Collaborators; Springer: Cham, Switzerland, 2022; pp. 87–103. [Google Scholar]
- Boada, J.P.; Maestre, B.R.; Genís, C.T. The ethical issues of social assistive robotics: A critical literature review. Technol. Soc. 2021, 67, 101726. [Google Scholar] [CrossRef]
- Lindholm, V. Unmanned Ground Vehicles in Urban Military Operations: A Case Study Exploring What the Potential End Users Want. Master’s Thesis, Linköping University, Linköping, Sweden, 2022. [Google Scholar]
- Moor, J. Four kinds of ethical robots. Philos. Now 2009, 72, 12–14. [Google Scholar]
- Lindsay, B.R.; Kapp, L.; Shields, D.A.; Stubbs, M.; Lister, S.A.; McCarty, M.; Kirk, R.S.; Bearden, D.M.; Bracmort, K.; Cowan, T. Federal emergency management: A brief introduction; Library of Congress: Washington, DC, USA, 2012. [Google Scholar]
- Hannaford, B.; Okamura, A.M. Haptics. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1063–1084. [Google Scholar]
- Erkmen, I.; Erkmen, A.M.; Matsuno, F.; Chatterjee, R.; Kamegawa, T. Snake robots to the rescue! Ieee Robot. Autom. Mag. 2002, 9, 17–25. [Google Scholar] [CrossRef]
- Liljeback, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. Experimental investigation of obstacle-aided locomotion with a snake robot. IEEE Trans. Robot. 2011, 27, 792–800. [Google Scholar] [CrossRef] [Green Version]
- Sanfilippo, F.; Azpiazu, J.; Marafioti, G.; Transeth, A.A.; Stavdahl, Ø.; Liljebäck, P. A review on perception-driven obstacle-aided locomotion for snake robots. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016; pp. 1–7. [Google Scholar]
- Sanfilippo, F.; Azpiazu, J.; Marafioti, G.; Transeth, A.A.; Stavdahl, Ø.; Liljebäck, P. Perception-driven obstacle-aided locomotion for snake robots: The state of the art, challenges and possibilities. Appl. Sci. 2017, 7, 336. [Google Scholar] [CrossRef] [Green Version]
- Ponte, H.; Queenan, M.; Gong, C.; Mertz, C.; Travers, M.; Enner, F.; Hebert, M.; Choset, H. Visual sensing for developing autonomous behavior in snake robots. In Proceedings of the International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2779–2784. [Google Scholar]
- Wright, C.; Buchan, A.; Brown, B.; Geist, J.; Schwerin, M.; Rollinson, D.; Tesch, M.; Choset, H. Design and architecture of the unified modular snake robot. In Proceedings of the International Conference on Robotics and Automation, St. Paul, MN, USA, 14–18 May 2012; pp. 4347–4354. [Google Scholar]
- Melo, K.; Paez, L.; Parra, C. Indoor and outdoor parametrized gait execution with modular snake robots. In Proceedings of the International Conference on Robotics and Automation, St. Paul, MN, USA, 14–18 May 2012; pp. 3525–3526. [Google Scholar]
- Sanfilippo, F. Combining Grasping with Adaptive Path Following and Locomotion for Modular Snake Robots. Int. J. Mech. Eng. Robot. Res. 2022, 11, 59–65. [Google Scholar] [CrossRef]
- Liljebäck, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. A review on modelling, implementation, and control of snake robots. Robot. Auton. Syst. 2012, 60, 29–40. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Gasoto, R.; Jiang, Z.; Onal, C.; Fu, J. Learning to locomote with artificial neural-network and cpg-based control in a soft snake robot. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 7758–7765. [Google Scholar]
- Kanda, T.; Glas, D.F.; Shiomi, M.; Ishiguro, H.; Hagita, N. Who will be the customer? A social robot that anticipates people’s behavior from their trajectories. In Proceedings of the 10th International Conference on Ubiquitous Computing, Seoul, Republic of Korea, 21–24 September 2008; pp. 380–389. [Google Scholar]
- Satake, S.; Kanda, T.; Glas, D.F.; Imai, M.; Ishiguro, H.; Hagita, N. How to approach humans? Strategies for social robots to initiate interaction. In Proceedings of the 4th ACM/IEEE international conference on Human robot interaction, La Jolla, CA, USA, 11–13 March 2009; pp. 109–116. [Google Scholar]
- Sirithunge, C.; Jayasekara, A.B.P.; Chandima, D. Proactive robots with the perception of nonverbal human behavior: A review. IEEE Access 2019, 7, 77308–77327. [Google Scholar] [CrossRef]
- Destephe, M.; Brandao, M.; Kishi, T.; Zecca, M.; Hashimoto, K.; Takanishi, A. Emotional gait: Effects on humans’ perception of humanoid robots. In Proceedings of the 23rd IEEE international symposium on robot and human interactive communication, Edinburgh Gate, UK, 25–29 August 2014; pp. 261–266. [Google Scholar]
- Rádlová, S.; Janovcová, M.; Sedláčková, K.; Polák, J.; Nácar, D.; Peléšková, Š.; Frynta, D.; Landová, E. Snakes represent emotionally salient stimuli that may evoke both fear and disgust. Front. Psychol. 2019, 10, 1085. [Google Scholar] [CrossRef] [Green Version]
- Casper, J.; Murphy, R.R. Human-robot interactions during the robot-assisted urban search and rescue response at the world trade center. IEEE Trans. Syst. Man Cybern. Part B 2003, 33, 367–385. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murphy, R.R. Trial by fire [rescue robots]. IEEE Robot. Autom. Mag. 2004, 11, 50–61. [Google Scholar] [CrossRef]
- Murphy, R.R. Human-robot interaction in rescue robotics. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev) 2004, 34, 138–153. [Google Scholar] [CrossRef]
- Birk, A.; Schwertfeger, S.; Pathak, K. A networking framework for teleoperation in safety, security, and rescue robotics. IEee Wirel. Commun. 2009, 16, 6–13. [Google Scholar] [CrossRef]
- Murphy, R.R.; Kravitz, J.; Stover, S.L.; Shoureshi, R. Mobile robots in mine rescue and recovery. IEEE Robot. Autom. Mag. 2009, 16, 91–103. [Google Scholar] [CrossRef]
- Liljebäck, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. Snake Robots: Modelling, Mechatronics, and Control; Springer: London, UK, 2013. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Liu, M.; Liu, X.; Tuo, X.; Wang, X.; Zhao, S.; Xiao, T. Design and realize a snake-like robot in complex environment. J. Robot. 2019, 2019, 1523493. [Google Scholar] [CrossRef]
- Yamada, H.; Hirose, S. Development of practical 3-dimensional active cord mechanism ACM-R4. J. Robot. Mechatron. 2006, 18, 305–311. [Google Scholar] [CrossRef]
- Huang, C.W.; Huang, C.H.; Hung, Y.H.; Chang, C.Y. Sensing pipes of a nuclear power mechanism using low-cost snake robot. Adv. Mech. Eng. 2018, 10. [Google Scholar] [CrossRef]
- Bogue, R. Snake robots: A review of research, products and applications. Industrial Robot 2014, 41, 253–258. [Google Scholar] [CrossRef]
- Duivon, A.; Kirsch, P.; Mauboussin, B.; Mougard, G.; Woszczyk, J.; Sanfilippo, F. The Redesigned Serpens, a Low-Cost, Highly Compliant Snake Robot. Robotics 2022, 11, 42. [Google Scholar] [CrossRef]
- Sanfilippo, F.; Helgerud, E.; Stadheim, P.A.; Aronsen, S.L. Serpens, a low-cost snake robot with series elastic torque-controlled actuators and a screw-less assembly mechanism. In Proceedings of the 5th International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 19–22 April 2019; pp. 133–139. [Google Scholar]
- Sanfilippo, F.; Hua, T.M.; Bos, S. A comparison between a two feedback control loop and a reinforcement learning algorithm for compliant low-cost series elastic actuators. In Proceedings of the 53rd Hawaii International Conference on System Sciences (HICSS 2020), Maui, HI, USA, 7–10 January 2020. [Google Scholar]
- Ariizumi, R.; Matsuno, F. Dynamic analysis of three snake robot gaits. IEEE Trans. Robot. 2017, 33, 1075–1087. [Google Scholar] [CrossRef]
- Kelasidi, E.; Kohl, A.M.; Pettersen, K.Y.; Hoffmann, B.; Gravdahl, J.T. Experimental investigation of locomotion efficiency and path-following for underwater snake robots with and without a caudal fin. Annu. Rev. Control 2018, 46, 281–294. [Google Scholar] [CrossRef]
- Matsuno, F.; Sato, H. Trajectory tracking control of snake robots based on dynamic model. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Ieee, Barcelona, Spain, 18–22 April 2005; pp. 3029–3034. [Google Scholar]
- Ma, S. Analysis of snake movement forms for realization of snake-like robots. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 4, pp. 3007–3013. [Google Scholar]
- De Graaf, M. An ethical evaluation of human–robot relationships. Int. J. Soc. Robot. 2016, 8, 589–598. [Google Scholar] [CrossRef] [Green Version]
- CMU Biorobotics Lab Deployment Report: EVN Zwentendorf Nuclear Power Plant, Zwentendorf, Austria, May 2013. Available online: http://biorobotics.ri.cmu.edu/applications/images/SnakeRobotZwentendorfReport.pdf (accessed on 10 November 2022).
- Ansari, A.; Whitman, J.; Saund, B.; Choset, H. Modular platforms for advanced inspection, locomotion, and manipulation. In Proceedings of the 43rd Annual Waste Management Conference (WM2017), Phoenix, AZ, USA, 5–9 March 2017. [Google Scholar]
- Bae, J.; Kim, M.; Song, B.; Jin, M.; Yun, D. Snake robot with driving assistant mechanism. Appl. Sci. 2020, 10, 7478. [Google Scholar] [CrossRef]
- Pfotzer, L.; Klemm, S.; Roennau, A.; Zöllner, J.M.; Dillmann, R. Autonomous navigation for reconfigurable snake-like robots in challenging, unknown environments. Robot. Auton. Syst. 2017, 89, 123–135. [Google Scholar] [CrossRef]
- Mu, Z.; Wang, H.; Xu, W.; Liu, T.; Wang, H. Two types of snake-like robots for complex environment exploration: Design, development, and experiment. Adv. Mech. Eng. 2017, 9, 1687814017721854. [Google Scholar] [CrossRef] [Green Version]
- Wright, C.; Johnson, A.; Peck, A.; McCord, Z.; Naaktgeboren, A.; Gianfortoni, P.; Gonzalez-Rivero, M.; Hatton, R.; Choset, H. Design of a modular snake robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 2609–2614. [Google Scholar]
- Racioppo, P.; Ben-Tzvi, P. Design and control of a cable-driven articulated modular snake robot. IEEE/ASME Trans. Mechatron. 2019, 24, 893–901. [Google Scholar] [CrossRef] [Green Version]
- Koopaee, M.J.; Bal, S.; Pretty, C.; Chen, X. Design and development of a wheel-less snake robot with active stiffness control for adaptive pedal wave locomotion. J. Bionic Eng. 2019, 16, 593–607. [Google Scholar] [CrossRef]
- Luo, M.; Yan, R.; Wan, Z.; Qin, Y.; Santoso, J.; Skorina, E.H.; Onal, C.D. OriSnake: Design, fabrication, and experimental analysis of a 3-D origami snake robot. IEEE Robot. Autom. Lett. 2018, 3, 1993–1999. [Google Scholar] [CrossRef]
- Shahid, T.; Gouwanda, D.; Nurzaman, S.G.; Gopalai, A.A. Moving toward soft robotics: A decade review of the design of hand exoskeletons. Biomimetics 2018, 3, 17. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fu, S.; Wan, Y. Communicating in remote areas or disaster situations using unmanned aerial vehicles. HDIAC J. 2016, 2, 4–8. [Google Scholar]
- Rañó, I.; Eguíluz, A.G.; Sanfilippo, F. Bridging the gap between bio-inspired steering and locomotion: A braitenberg 3a snake robot. In Proceedings of the 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 11–13 December 2018; pp. 1394–1399. [Google Scholar]
- Ferrarini, L.; Veber, C.; Lorentz, K. A case study for modelling and design of distributed automation systems. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003; Volume 2, pp. 1043–1048. [Google Scholar]
- Documentation–ROS Wiki. Available online: http://wiki.ros.org/ (accessed on 19 November 2022).
- Roldán, D.; Mahna, S.; Canas, J.M. A ROS-based open web platform for Intelligent Robotics education. In Robotics in Education; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2022; Volume 1359. [Google Scholar]
- Bruyninckx, H. Open robot control software: The OROCOS project. In Proceedings of the IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), Seoul, Republic of Korea, 21–26 May 2001; Volume 3, pp. 2523–2528. [Google Scholar]
- Sanfilippo, F.; Stavdahl, Ø.; Liljebäck, P. SnakeSIM: A ROS-based control and simulation framework for perception-driven obstacle-aided locomotion of snake robots. Artif. Life Robot. 2018, 23, 449–458. [Google Scholar] [CrossRef]
- Gazebo. Available online: https://gazebosim.org/home (accessed on 19 November 2022).
- Pitonakova, L.; Giuliani, M.; Pipe, A.; Winfield, A. Feature and performance comparison of the V-REP, Gazebo and ARGoS robot simulators. In Proceedings of the Annual Conference Towards Autonomous Robotic Systems, Bristol, UK, 22 July 2018; Springer: Cham, Switzerland, 2018; pp. 357–368. [Google Scholar]
Figure 1.
Examples and categories of various robots that could be used in SAR applications [11].
Figure 1.
Examples and categories of various robots that could be used in SAR applications [11].

Figure 2.
This diagram illustrates a framework for emergency management with four phases and various components included in every phase.
Figure 2.
This diagram illustrates a framework for emergency management with four phases and various components included in every phase.

Figure 3.
An illustration of a disaster to highlight the range of individuals and technologies that can be involved in SAR operations.
Figure 3.
An illustration of a disaster to highlight the range of individuals and technologies that can be involved in SAR operations.

Figure 4.
Illustrating the benefits of the modular design of the snake robot. This makes it possible to: (a) achieve locomotion even in the event of a module failure; (b) modular reconfiguration (self-assembly) of the snake robot.
Figure 4.
Illustrating the benefits of the modular design of the snake robot. This makes it possible to: (a) achieve locomotion even in the event of a module failure; (b) modular reconfiguration (self-assembly) of the snake robot.

Figure 5.
A generalised guidance, navigation, and control architecture for snake robot [65].
Figure 5.
A generalised guidance, navigation, and control architecture for snake robot [65].

Figure 6.
Ethical dilemmas in decision-making (control) in SAR scenarios.


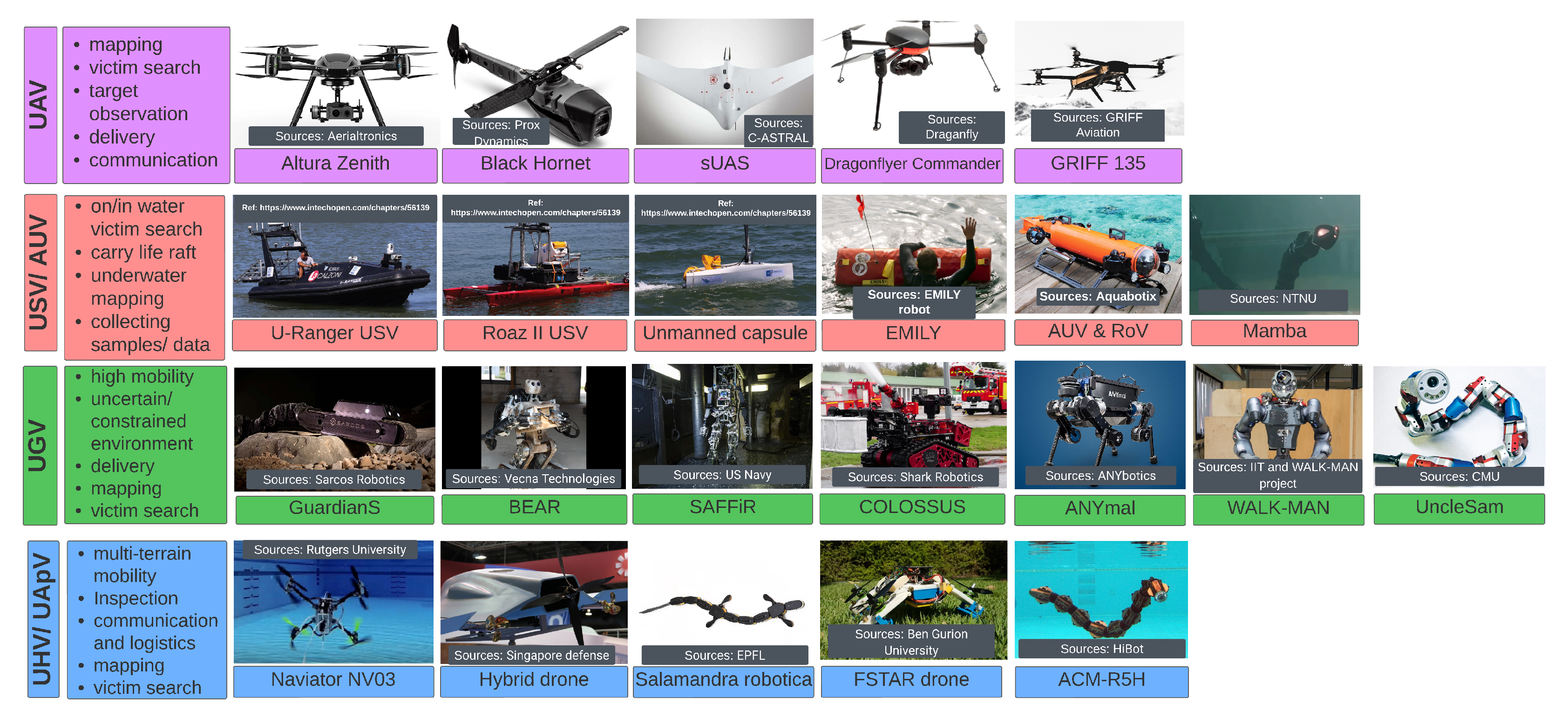{kind=link}
{kind=link}
{kind=link}
{kind=link}
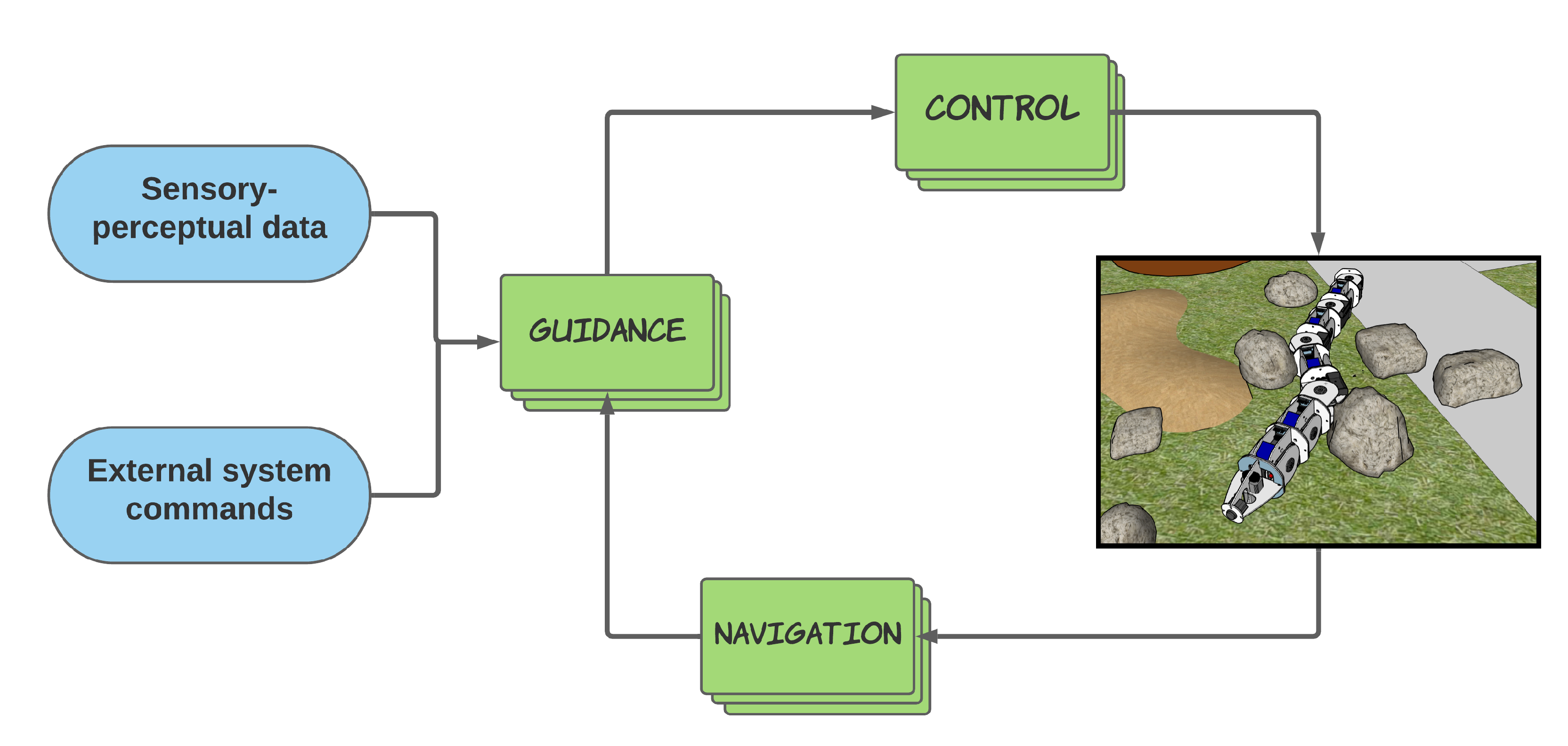{kind=link}
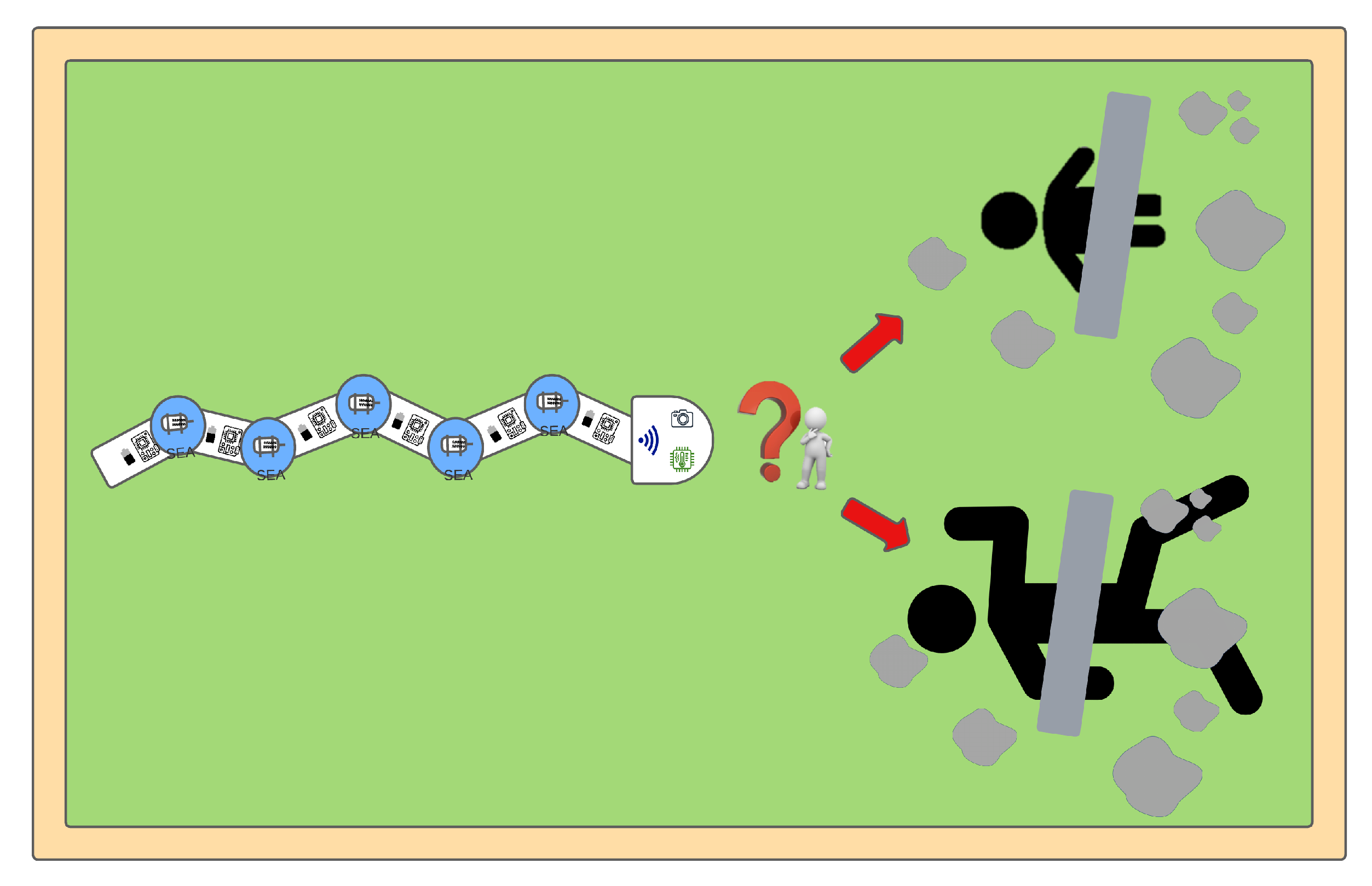{kind=link}
Table 1.
Ethical framework for robotic SAR response phase operation.
| S. No. | Ethical Issues | Ethical Considerations | Brief Idea/Description |
|---|---|---|---|
| 1 | Autonomy | Operation level | How much autonomy each SAR operation is allowed to have? |
| Equality | Should we make a comparison between robots and living things in Search and Rescue situations? | ||
| Responsibility | Who is responsible for what during every level of robotic SAR operation? | ||
| Rights | What types of rights, if any, should robots have that people do? | ||
| 2 | Society-robot relationship | Nostalgia and conservatism | Will the public accept the robot for Search and Rescue? |
| Trust | In a SAR mission, will people trust the robot’s decision? | ||
| Expectation | Will robots behave as anticipated in SAR, or do people have irrational expectations? | ||
| 3 | Human-robot interaction | Accountability | Who bears responsibility for careless interactions with the victim during the response phase? |
| Reliability and trust | Will the robot consistently behave correctly during the interaction? Will users have trust in robot interactions? | ||
| Care and safety | Is the method and speed of interaction safe and affords the victim care? | ||
| 4 | Data | Data safety and security | Will the disaster-related data collected be secure and safe for future use? |
| Accessibility | Who is allowed to access the data? | ||
| Privacy | Is it permitted for the robot to collect private and sensitive information about the victim from SAR? |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Chitikena, H.; Sanfilippo, F.; Ma, S. Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase. Appl. Sci. 2023, 13, 1800. https://doi.org/10.3390/app13031800
AMA Style
Chitikena H, Sanfilippo F, Ma S. Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase. Applied Sciences. 2023; 13(3):1800. https://doi.org/10.3390/app13031800
Chicago/Turabian StyleChitikena, Hareesh, Filippo Sanfilippo, and Shugen Ma. 2023. "Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase" Applied Sciences 13, no. 3: 1800. https://doi.org/10.3390/app13031800
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.